DeepSeek 🐬:国产大模型之光?它用到了哪些关键技术?
DeepSeek:国产大模型之光?
大语言模型领域的发展真的很快,上一篇 LLaMA 的博客还没有写完,DeepSeek 又得到了铺天盖地的宣传。尽管 Linus 等人总是对人工智能的发展持观望态度,但不得不承认 AI 简直就是现如今的“流量密码”。这次我也试着跟一下风,来对 DeepSeek 抽丝剥茧一下,看看这款号称“国产AI之光”的模型究竟有哪些优秀的地方吧!
DeepSeek-R1 发布于 25 年 1 月份,当时中国人们差不多正在过年。一经发布,DeepSeek 便刷屏各大网站,势头猛烈、非同凡响。其实早在 2024 年,DeepSeek 就陆续发表过许多文章(14 篇),但没有引起很多的关注。而 DeepSeek-R1 则是 DS 团队近两年的科技突破的集大成者。
![]()
DeepSeek 官方已将其系列的相关文章整理出来,放在 Huggingface,感兴趣的小伙伴可以去查看。以防万一,这里将它抄录在这里 (从上至下,发布时间由新到旧)。
What’s UP !? 这么多的论文怎么看的完(我只是一个苦逼大学生)? 好在已经有前人淌过水了。一些大佬对这些论文的评价是:如果想要快速地对 DeepSeek 有一个直观且较为深入的了解,可以重点看其中的三篇文章:DeepSeekLLM、DeepSeek-V3、DeepSeek-R1。
本篇博客将重点围绕 DeepSeek-V3 这篇“大而全”的技术报告,并结合 DeepSeek-R1 论文的相关内容,由详到略依次介绍 DeepSeek 的:
- 模型上的改进部分,包括:多头潜在注意力机制 、混合专家模型 、多 Token 预测 ;
- 训练框架上的优化,如 DualPipe 算法,以及 FP8 混合精度训练;
- 利用强化学习提升模型能力:回馈函数的设计、群体相对策略优化 (GRPO) 算法;
- DeepSeek-V3 的表现:评分标准、对比基线等。
- DeepSeek-R1 的相关内容,特别是其 对于 LLM 自主学习能力的探索。
模型上的改进:更快、更好,同时追求速度和质量
Deepseek 在模型上的改进有两条主线:一是优化模型表现,使用了更复杂的 MoE 混合专家模型。二是提高推理速度,使用了 MLA 多头潜在注意力机制和 MTP 多 Token 预测技术。📖
多头潜在注意力 (MLA)
多头潜在注意力机制的引入主要是为了提升大模型的推理速度,其核心是通过 低秩分解 减少推理过程中的 KV-Cache 。你可以参考我写的另外两篇博客来理解什么是 低秩分解 和 KV-Cache。
回到我们的正题上来。我们都知道,大模型在推理时常用名为 KV 缓存的技术来加快速度,这导致对显存的极大占用。针对这一问题,诸如 Llama 等模型都采用了 GQA 的方法,deepseek 在此基础上更进一步,仅将 KV 的潜在特征缓存,进一步缩小了存储的空间。
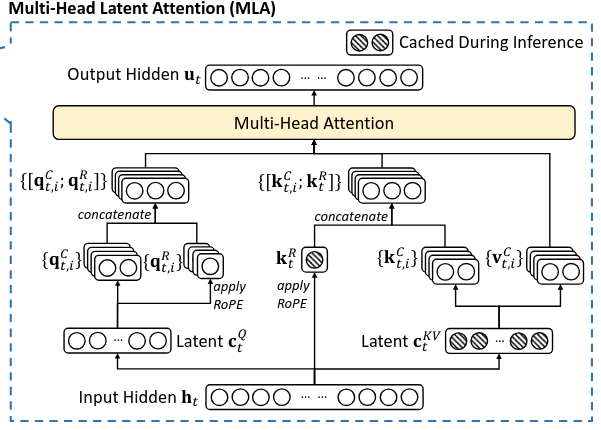
这样子讲会比较抽象,结合公式来看图,会对理解其过程更有帮助:
- 从下往上看:首先,MLA 的输入为 $h_t$,假设其维度为 $d$,下标 $t$ 表示其是第 $t$ 个 token.
- 输入进入后有三条路线,先看最右边,这里进行了次降维 $c_t^\mathsf{KV}=W^\mathsf{DKV}h_t$.
- $c_t^\mathsf{KV}\in\mathbb{R}^{d_c}$,是将被缓存的潜在特征,其维度远小于 KV 对.
- $W^\mathsf{DKV}\in\mathbb{R}^{d_c\times{d}}$,是降维矩阵 (Down KV matrix) ,它将在微调时学习.
- 缓存后的 $c_t^\mathsf{KV}$ 将在下次推理时被“释放”,生成用于计算注意力的 $\mathbf{K}$ 和 $\mathbf{V}$.
- $[\mathbf{k}_{t,1}^\mathsf{C},\mathbf{k}_{t,2}^\mathsf{C},\cdots,\mathbf{k}_{t,h_n}^\mathsf{C}]=\mathbf{k}_t^\mathsf{C}=W^\mathsf{UK}c_t^\mathsf{KV}$
- $[\mathbf{v}_{t,1}^\mathsf{C},\mathbf{v}_{t,2}^\mathsf{C},\cdots,\mathbf{v}_{t,h_n}^\mathsf{C}]=\mathbf{v}_t^\mathsf{C}=W^\mathsf{UV}c_t^\mathsf{KV}$
- $h_n$ 是注意力头的个数 (heads number) ,有多少头就要缓存多少 KV 对.
- $W^\mathsf{UK}$ 和 $W^\mathsf{UV}$ 是两个升维矩阵 (Up K matrix 和 Up V matrix).
- 看完右边再来看中间:这里对输入进行了 RoPE 旋转位置编码得到了 $\mathbf{k}_t^\mathsf{R}$.
- $\mathbf{k}_t^\mathsf{R}=\mathsf{RoPE}(W^\mathsf{KR}h_{t})$,注意它将被缓存.
- 关于 RoPE 可以去看我的另外一篇博客,里面有 RoPE 的详细代码:Llama2 RoPE.
- 拼接 $\mathbf{k}_t^\mathsf{C}$ 与 $\mathbf{k}_t^\mathsf{R}$ ,即得到正式参与注意力的 $\mathbf{K}$.
- 最后是左边关于 $\mathbf{Q}$ 的处理部分,同样进行了降维、升维、 RoPE 与 拼接.
- $c_t^\mathsf{Q}=W^\mathsf{DQ}h_t$
- $[\mathbf{q}_{t,1}^\mathsf{C},\mathbf{q}_{t,2}^\mathsf{C},\cdots,\mathbf{q}_{t,h_n}^\mathsf{C}]=\mathbf{q}_t^\mathsf{C}=W^\mathsf{UQ}c_t^\mathsf{Q}$
- $\mathbf{q}_{t}^\mathsf{R}=\mathsf{RoPE}(W^\mathsf{QR}h_t)$
- 拼接 $\mathbf{q}_t^\mathsf{C}$ 与 $\mathbf{q}_t^\mathsf{R}$ ,即得到正式参与注意力的 $\mathbf{Q}$.
以上部分走完后就是传统的多头注意力机制了,$\mathbf{K}$ 和 $\mathbf{Q}$ 点积缩放归一过后与 $\mathbf{V}$ 相乘,最终的结果再经过一个输出矩阵 $W^\mathsf{O}$ 转化后即得。那么回头来想一下,其实我们废了这么大劲就只是为了使推理时的显存占用变得更小而已:原来的 KV-Cache 缓存完整的 KV 对,而 MLA 仅缓存 KV 对中低维本质的特征。
混合专家模型 (MoE)
MoE 发生在 FFN 中,最早是由 GPT-4 引入,旨在突破密集网络 (Dense Network) 对参数的限制。MoE 丢弃了传统 Transformer 块中单 FFN 的设计,引入了多个独立专家,利用门控机制 (gating) 将输入路由到少量且亲和度高的专家网络,从而实现模型的稀疏化。
MoE 基础架构
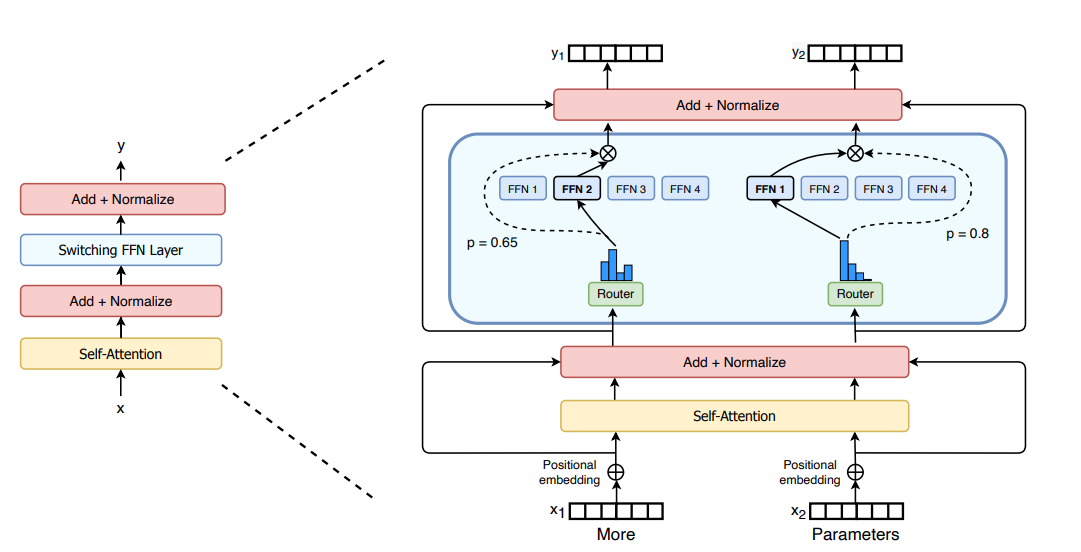
如上图所示,注意力的输出经残差连接后即进入 MoE 模块 (浅蓝色,Switching FFN layer)。在 MoE 中,路由 Router 将会对各 token 进行判断:x1 与 FFN2 的亲和度更高,x2 与 FFN1 的亲和度更高…… MoE 确保所有 token 都只经过与其最适应的前 k 个专家网络,并将这 k 个专家给出的结果按照亲和度线性求和。写成公式就是下面这样,其中下标 $_t$ 表示第 $t$ 个 token:
$$
\begin{aligned}
& y_t = x_t + \sum_{i}^{N} g_{i,t} \cdot \mathrm{FFN}_i (x_t) \qquad\qquad\text{线性求和后残差连接,其中 $\sum_{i}^{N} g_{i,t} = 1$}
\\
& g_{i,t} = \frac{ s_{i,t} }{ \sum_{j}^{N} s_{j,t} } \qquad\qquad\qquad\qquad\text{将路由得分归一化,$N$ 即专家数,也就是路由出数}
\\
& s_{j,t} = \begin{cases} \mathrm{Sigmoid}(x_t^\mathrm{T} e_j), &\quad {s_{j,t} \in \mathrm{topK}} \\ 0, &\quad\text{otherwise} \end{cases} \qquad\text{除非得分排名前 k,否则视作 0 分,$e \in \mathbb{R}^{H \times N}$ }
\end{aligned}
$$
DeepSeekMoE
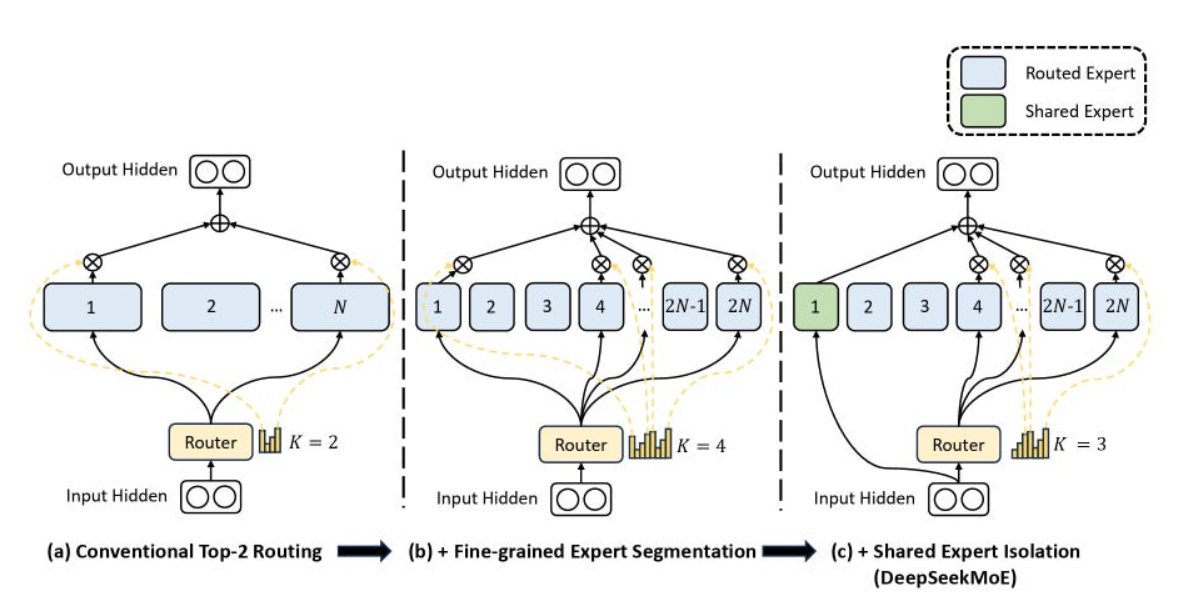
DeepSeek 对传统的 MoE 进行了改进,主要有 4 点:
- 用 更复杂的线性/非线性变换 代替原有的 FFN 式的 expert 网络;
- 使用 规模更小但数量更多 的 expert ,搭配 分组机制 来实现更细粒度的路由选择;
- 引入了 共享专家和独立专家 的概念,进行混合的 MoE 组合;
- 在各专家之间进行无辅助函数的 负载均衡。
DeepSeek 中对 MoE 部分的代码如下,主要由 Expert()、Gate()、MoE() 三部分组成。
专家网络 Expert()
1 | |
门控/路由层 Gate()
1 | |
混合专家模块 MoE()
1 | |
无辅助损失函数的负载均衡
理想的情况下,各个专家被激活的概率应该相当。如果一些专家很少被激活,而另一些专家总是被激活,那么利用多个专家进行并行计算的效率就会大打折扣。为了实现专家间的负载均衡,过去常采用辅助的损失函数来对非均衡路由的行为进行惩罚,这提升了梯度计算的复杂性。针对此问题,DeepSeek 试图实现无辅助损失函数的负载均衡策略。
$$s_{j,t} = \begin{cases} \mathrm{Sigmoid}(x_t^\mathrm{T} e_j) + b_j, &\quad {s_{j,t} \in \mathrm{topK}} \\ 0, &\quad\text{otherwise} \end{cases}$$
他们是怎么做的呢?他们追踪每个专家被激活的频率,在训练的每一步手动调整专家得分的偏置 bias: 使过载的专家得分减去 $\gamma$,低载的专家得分加上 $\gamma$,这里的 $\gamma$ 是一个超参数。 回顾我们在之前看的代码,我们在加上偏置之前保留了一份得分的副本 original_scores 作为专家的权重,而把 scores 加上偏置后去计算专家的索引。这实际上部分地隔离了专家的得分和激活概率,从而在模型性能和负载平衡之间进行了 trade-off。
多 Token 预测 (MTP)
当前主流的大模型(LLMs)都是decoder-base的模型结构,也就是无论在模型训练还是在推理阶段,对于一个序列的生成过程,都是token-by-token的。每次在生成一个token的时候,都要频繁跟访存交互,加载KV-Cache,再通过多层网络做完整的前向计算。对于这样的访存密集型的任务,通常会因为访存效率形成训练或推理的瓶颈。
MTP 针对解码阶段进行优化,将原来的 one-token 的生成变成 multi-token 的生成,从而提升训练和推理性能。具体来说:
- 在训练阶段,一次生成多个后续的 token,可以一次学习多个位置的标签,进而提升样本的利用效率,提升训练速度。
- 在推理阶段,通过一次生成多个 token,实现成倍的推理加速来提升推理性能。
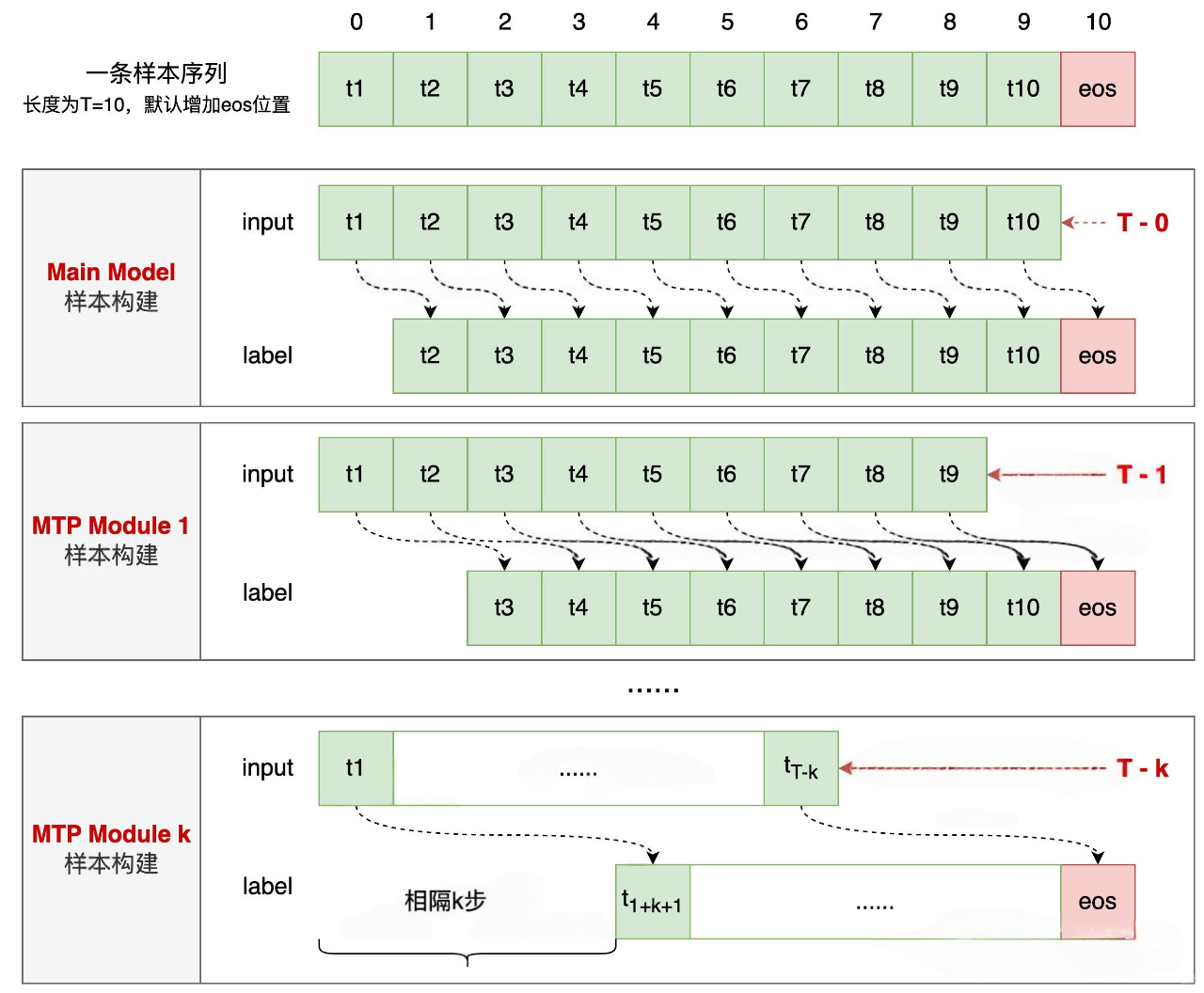
DeepSeekMTP 模块细节
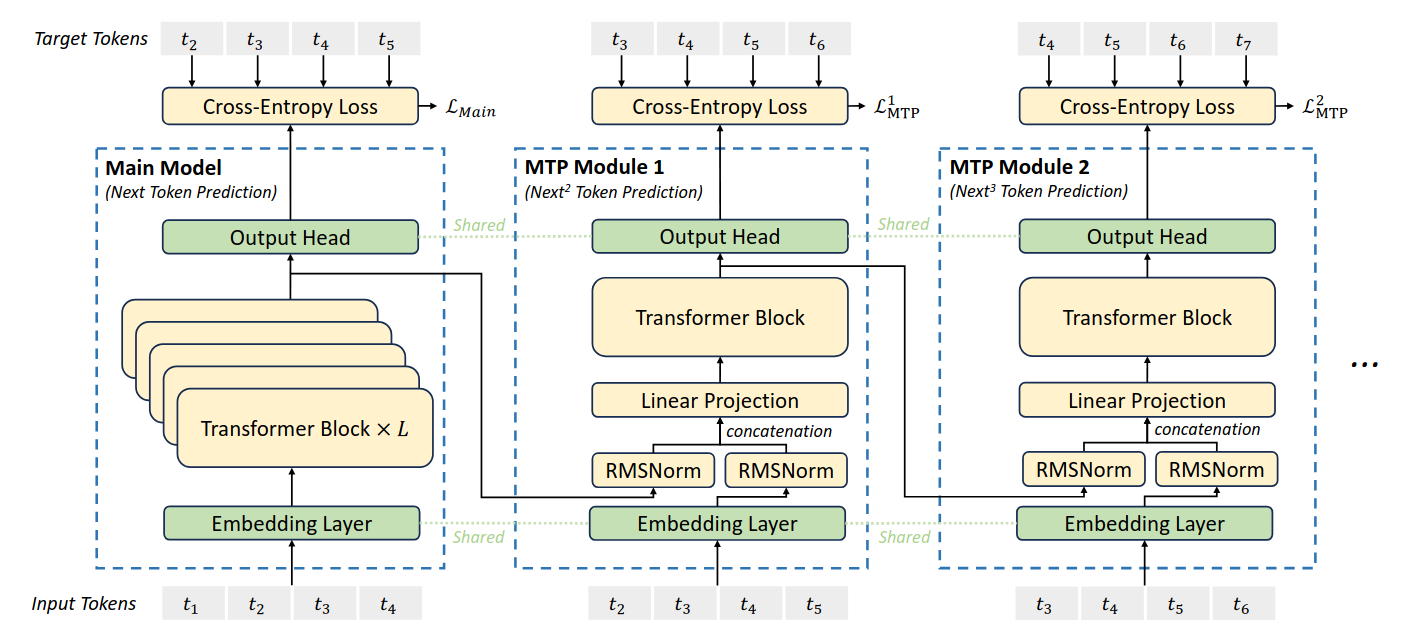
从网络结构出发,看看 DeepSeek 的 MTP 的设计。如上图所示,DeepSeek 对 MTP 的实现保留了序列推理的连接关系,在输出阶段,从一个 Module 连接到后继的 Module。从左往右,分别是主模型、Module1、Module2……,串行的 Module 越多,预测的 token 量也越多,预测深度也就越深。它的详细流程是这样的:
- 对于所有 Module 来说,所有的输入都共享一个嵌入层 $\mathsf{Emb}()$.
- 对于第 $i$ 个 token $t_i$,假设当前要预测的深度在第 $k$ 层.
- 我们有 $h_i^{‘k} = M_k[\mathsf{RMSNorm}(h_i^{k-1});\mathsf{RMSNorm}(\mathsf{Emb}(t_{i+k}))]$
- 首先将 $t_i$ 对第 $k-1$ 层的隐藏层输出 $h_i^{k-1}\in\mathbb{R}^{d}$ 进行均方根规范化.
- 再对第 $i+k$ 位置的 token 嵌入层输出 $\mathsf{Emb}(t_{i+k})\in\mathbb{R}^{d}$ 也进行均方根规范化.
- 将上述两个结果 concat 后,经由矩阵 $M_k\in\mathbb{R}^{d\times{2d}}$ 线性变换得到 $h_{i}^{‘k}\in\mathsf{R}^{d}$
- $h_i^{‘k}$ 即为当前 Module 中 Transformer 块的输入.
- 主模型包含一个较深的 Transformer 栈,而其余的 Module 都只含 1 个.
- 因为是串行,所以各个 Module 将能看到其之前的所有信息.
- $h_{1:T-k}^{k} = \mathsf{Trm}(h_{1:T-k}^{‘k})$,它将用于之后的 Module,并且其自身也即将输出.
- 这里的下标 $_{1:T-k}$ 表示输入 token 的范围:从第 1 个 token 到第 $T-k$ 个 token.
- $T$ 是预测后的序列长度,显然预测的第 $T$ 个 token 应当对应输入的第 $T-k$ 个 token.
- 于是也能知道输入的序列长度总是 $T-k$.
- 最后,将 $h_i^{k}$ 通过映射矩阵 $\mathsf{OutHead}\in\mathbb{R}^{V\times{d}}$ 变换和 $\mathsf{Softmax}()$,该矩阵在各 Module 间共享.
- $p_{i+k+1}^{k}=\mathsf{Softmax}(\mathsf{OutHead}(h_i^{k}))$.
- $p_{i+k+1}^{k}\in\mathbb{R}^V$,是词表 $V$ 维度的概率输出.
- 上标 $^{k}$ 表示当前预测深度为 $k$,下标 $_{i+k+1}$ 表示是对序列的第 $i+k+1$ 处的预测.
DeepSeekMTP 训练过程和推理阶段
训练阶段使用的多 Token 预测部分的损失函数 $\mathcal{L}_\mathsf{MTP}$ 是将每个 Module 的 CSE 损失求平均值,并乘上一个权重因子 $\lambda$. 这部分损失将作为主损失 $\mathcal{L}_\mathsf{main}$ 的附加损失,在训练过程中同时计算梯度。
$$\mathcal{L}_\mathsf{MTP}=\frac{\lambda}{D}\sum_{k=1}^{D}\mathcal{L}_\mathsf{MTP}^{k}\qquad其中,\mathcal{L}_\mathsf{MTP}^{k}=\mathsf{CSE}(p_{2+k:T+1}^{k},t_{2+k:T+1})=-\frac{1}{T}\sum_{i=2+k}^{T+1}\log(P_i^k[t_i])$$
这里计算 CSE 时下标从 $2+k$ 开始到 $T+1$ 结束,很好理解:假设当前预测深度为 $k$,那么我们在第 $k$ 个 Module,此时输入的第 1 个 token 是原序列中的第 $k+1$ 个 token. 对应到真实标签中就是第 $k+2$ 个 token,这意味着前面的 token 将不参与计算. 然而无论预测深度是多少,计算 CSE 时总会除以序列长度 $T$,因此 $k$ 越深,其对总体损失的影响越小.
DeepSeekV3 中强调,MTP 的设计主要是为了训练过程能加速收敛,更充分的使用训练样本。所以针对推理阶段只是简单介绍了一段。这里也稍微展开讲下推理的过程。DeepSeekV3 推理可以有两种方法:
- 方法1:直接把 MTP Module 头全部删掉,模型变成了单 token 预测的。然后部署模型,用自回归 autoregressive 做推理。这个就跟正常 LLM 模型推理一样,没有什么加速。
- 方法2:保留 MTP Module 做 self-speculative 解码
(这个可能翻译成“自猜测”,我自己猜测的xwx),这样充分使用多 token 预测能力,提升推理加速性能。
训练框架上的优化:极大减少显存占用,实现 “飞速” 训练
DeepSeek-V3 是在配备 2048 块 NVIDIA H800 GPU 的集群上进行训练的。H800 集群中的每个节点包含 8 块通过 NVLink 和 NVSwitch 相互连接的 GPU。不同节点之间则通过 InfiniBand(IB)互连来实现通信。
DeepSeek-V3 的训练由 HAI-LLM 框架支持,该框架是由 DS 团队从零开始打造的高效且轻量的训练框架。总体而言,DeepSeek-V3 应用了 16 路流水线并行(PP)、64 路专家并行(EP)跨越 8 个节点,以及 ZeRO-1 数据并行(DP)。为了促进 DeepSeek-V3 的高效训练,DS 团队实施了细致的工程优化,包括 DualPipe 算法以及 FP8 混合精度训练。
DualPipe 算法框架
对于 DeepSeek-V3,跨节点专家并行带来的通信开销导致 计算/通信比 约为低效的 1:1。为了解决这一挑战,DS 团队设计了一种创新的管道并行算法,称为 DualPipe,它不仅通过有效地重叠前向和后向计算的通信阶段来加速模型训练,而且还 减少了管道气泡。
计算/通信比
指计算操作与通信操作的时间比例⏰。计算常常是高效的,而通信则效率较低。计算/通信比低意味着设备频繁因通信等待而闲置,需通过异步传输重叠计算与通信操作提升计算占比。
管道 🪈
一种并行训练技术,将模型按照层或模块拆分成多个阶段 (Stage) 分配到不同的设备,数据以微批次 (Micro-batch) 流经各阶段。管道像流水线一样:各个阶段处理完一个微批次并传递给下个阶段后,就立刻处理下个微批次,而非等待所有阶段完成。 这样做实现了对计算设备的高效复用。
管道气泡
指设备等待数据的空闲时间。在管道中,由于各阶段计算速率差异或通信延迟,设备在处理完当前微批次后可能还需要花时间等待前一阶段的输出,导致该设备空闲,这被形象地称为“气泡”。管道气泡常成为并行训练的优化瓶颈😐。
计算与通信重叠
DualPipe 的关键思想是在一对独立的前向、后向块中重叠计算与通信。 具体来说,单个 GPU 中有很多 SM,DualPipe 将其中一部分 SM 用于通信操作,而将另一部分 SM 用于计算操作。通过调整专用于通信和专用于计算的 GPU SMs 的比例,DualPipe 成功地使通信操作完全隐藏在计算操作之间。更进一步地,是前向的通信重叠于后向的计算,而后向的通信重叠于前向的计算。

- 绿、蓝色部分是反向传播,黄色部分是前向传播,紫色为 PP 组件,红色为同步操作。
- 前向传播分为四个阶段:
DISPATCH(F)、MLP(F)、COMBINE(F)、ATTN(F),其中通信和计算操作相互错开,运行在不同的 SM 上。 - 后向传播分为
MLP(B)、MLP(W)、DISPATCH(B)、ATTN(B)、ATTN(W)、COMBINE(B),后缀为(B)表示针对输入而(W)表示针对权重,对输入反传的通信和对权重反传的计算可以并行。 - 注意前向的通信与后向的计算重叠,而后向的通信与前向的计算重叠。
因为这种有效的前后向通信计算重叠策略,DualPipe 得以采用双向管道方式,从设备列表的两端同时输送微批次,如下图所示。例如,以微批次 0 为例:它的前向传播经历了 8 个阶段,流经了 8 个不同的设备;之后再倒序流经这 8 个设备进行反向传播,此时它能够与另一个正在前向传播的微批次重叠运行在同一设备上,而不是等待其他微批次完成前向操作。

显然,双向管道的方法使得 DualPipe 必须在训练过程中保存两份模型参数的副本,但是这点内存的消耗相比时间上的节约显得九牛一毛。DS 称,这种方法极大地减少了管道气泡,而仅以很小的额外内存作为代价。此外,对于 DualPipe,管道气泡和激活内存都不会随着微批数量的增加而增加。
跨节点全双工通信
DualPipe 通过定制跨节点通信的 kernel 与网络拓扑协同设计实现高效通信。系统将每个 token 的传输路径限制在至多 4 个节点,优先通过 IB 网络跨节点传输至目标节点对应的 GPU,随后立即通过高带宽 NVLink 转发到具体专家 GPU,使 IB 与 NVLink 的通信完全重叠。这种设计使得每个节点平均可处理 3.2 个专家,在保持通信成本不变的情况下将专家选择规模扩展至 13 个,同时仅需 20 个 SM 即可充分利用带宽。
系统采用动态资源分配策略优化通信效率,将 20 个 SM 划分为 10 个通信信道,通过 warp specialization 技术实现发送、转发、接收任务并行处理。通信过程中根据实时负载动态调整各环节的硬件资源配比,并配合定制 PTX 指令与自动优化的通信块大小,显著减少 L2 缓存占用和对其他计算任务的干扰。调度与组合内核还与计算流形成重叠执行,进一步降低通信对整体计算性能的影响。
用极小的时间代价实现极致的内存节约
预先计算 RMSNorm 和 MLA 升维操作的结果
RMSNorm 和 MLA 中的升维操作频繁发生在前向传播过程中。然而,DS 注意到这两项操作的输入有时候是固定的。 (比如,对嵌入层输出进行 RMSNorm 时,以及 MLA 中将被缓存的低秩潜在特征升维到高维原始特征时。) 这种输入不变性使反向传播过程中的预计算成为可能。于是,DS 在反向传播的过程中预先计算正向传播中 RMSNorm 和 MLA 升维操作的结果,避免保存中间激活值。 这种策略以极低的时间开销减少了极大的内存存储消耗。
CPU 的指数移动平均 (EMA, Exponential Moving Average)
指数移动平均 EMA 是一种参数平滑更新技术,是指通过历史参数的加权平均生成稳定版本,用于缓解训练波动。DS 采用 CPU 的内存来存储模型参数的 EMA 值,用于学习率衰减阶段的性能预估。EMA 参数通过异步方式更新,在 GPU 训练间隙完成数据传输与参数更新,消除设备内存占用。
MTP 阶段共享嵌入 (Embedding) 和输出层 (Output Head)
基于 DualPipe 流水线策略,将模型最浅层(嵌入层)与最深层(输出头)部署于同一流水线并行(PP)层级。 通过物理合并相邻计算单元,使参数存储地址一致。 各 MTP Module 间共享嵌入层/输出头的参数及梯度,减少重复存储开销,同时保留多 Token 预测功能。
FP8 混合精度训练
FP8 混合精度训练框架
DS 提出了面向 FP8 训练的混合精度框架,如下图。该框架将大部分计算密集型操作保留在 FP8 精度,同时策略性地维持少量关键操作的原始数据格式,以平衡训练效率与数值的稳定性。
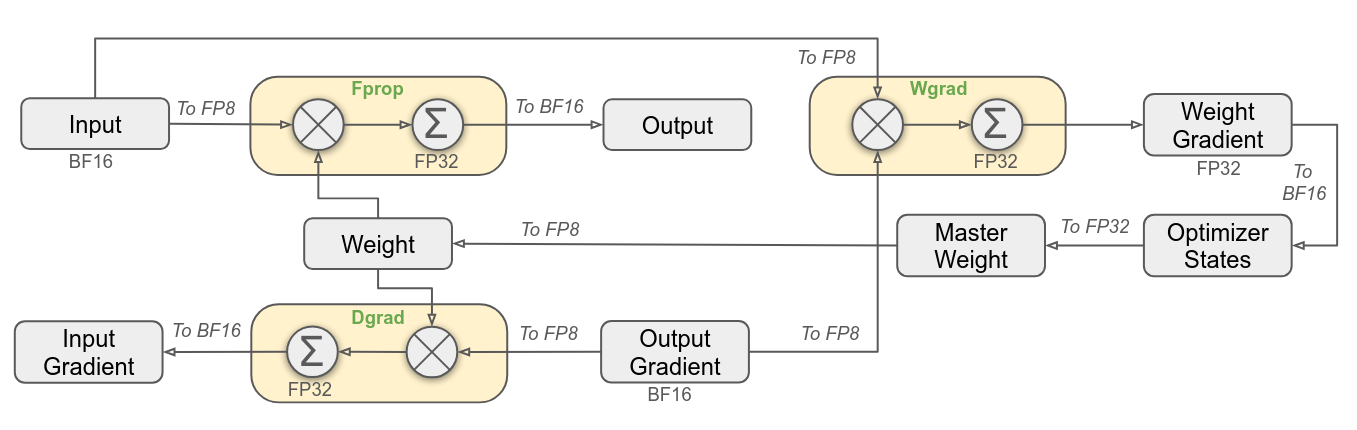
- 首先,核心计算算子,也即通用矩阵乘法 (GEMM,GEneral Matrix Multiplication) 部分主要采用 FP8 精度实现。这些 GEMM 操作接受 FP8 的张量输入,并产生 FP16 或 FP32 的输出。
- 线性算子相关三个 GEMM 操作分别是:前向传播 (Fprop)、激活反向传播 (Dgrad)、权重反向传播 (Wgrad),均以 FP8 执行。该设计理论上可使计算速度较原始 BF16 方法提升一倍。
- 此外,FP8 格式的 Wgrad 允许以 FP8 存储激活值供反向传播使用,这显著降低了内存消耗。
- 然而,某些算子因对低精度计算敏感仍需保持更高精度。同时,部分低开销算子使用更高精度也不会显著增加整体训练成本。
- 因此,DS 对以下模块仍维持原始精度:嵌入模块、输出头、MoE 门控模块、归一化算子和注意力算子。这种有针对性的高精度保留确保了训练稳定性。
- 最后,DS 以更高精度存储主权重、权重梯度和优化器状态。这带来了一定的内存开销,但进一步保障了数值稳定性。而且通过分布式训练系统中的多 DP 并行分片策略,可有效控制其负面影响。
提升混合精度训练的精确度
基于上述 FP8 混合精度框架,DS 引入了几种提高低精度训练精确度的策略,重点关注在两个方面:细粒度的量化方法 和 提高累加操作的精度。
细粒度的量化方法 (Fine-Grained Quantization)
将浮点数从 FP16/32 的高精度转向 FP8 的低精度通常会导致数值的上溢或者下溢。针对该问题,通常的做法是将输入张量的最大绝对值缩放到 FP8 的最大可表示值 (例如 E4M3 为 $S.1111.110_2=480$),来将输入的分布对齐到 FP8 的可表示范围,这一操作被称为量化。由此我们引入了 放缩因子 Scaling Factor 的概念,它的计算方式是:$$放缩因子=\frac{\text{FP8}的最大可表示值}{输入张量的最大绝对值}$$ 放缩时,输入张量中的所有浮点数都应当乘上这个放缩因子。然而,全局放缩带来一个问题:当输入张量中某个数异常大时,放缩因子会格外地小,导致其它其他正常值被过度压缩,严重丢失精度。为此,DS 提出应当进行更细粒度的放缩而非全局放缩。具体来说,如下图 (a) 所示:
- 将输入张量 Input 划分为若干大小为 $N_c$ 的段,每段只对自身进行量化,从而避免异常值干扰全局。
- 类似地,将权重张量 Weight 划分为若干个 $N_c\times{N_c}$ 块,每块只对自身量化。
在实际操作中,DS 采用了在线量化 (Online Quantization) 而非延时量化 (Delay Quantization) 的方式,即:在量化各输入分片和各权重分块时,根据当前的数据块的最大绝对值,而非依赖历史的统计值来计算各数据块的放缩因子。这以少量的时间开销换取了更高的量化精度。🤔 DS 的这种细粒度的量化策略与 Nvidia 最近宣布的新一代 GPU 将支持的微缩放格式的理念高度一致,或可为未来研究适配最新硬件提供参考。另一方面,这种细粒度的量化策略还与 DS 提出的另一个 FP32 精确累加策略配合良好。
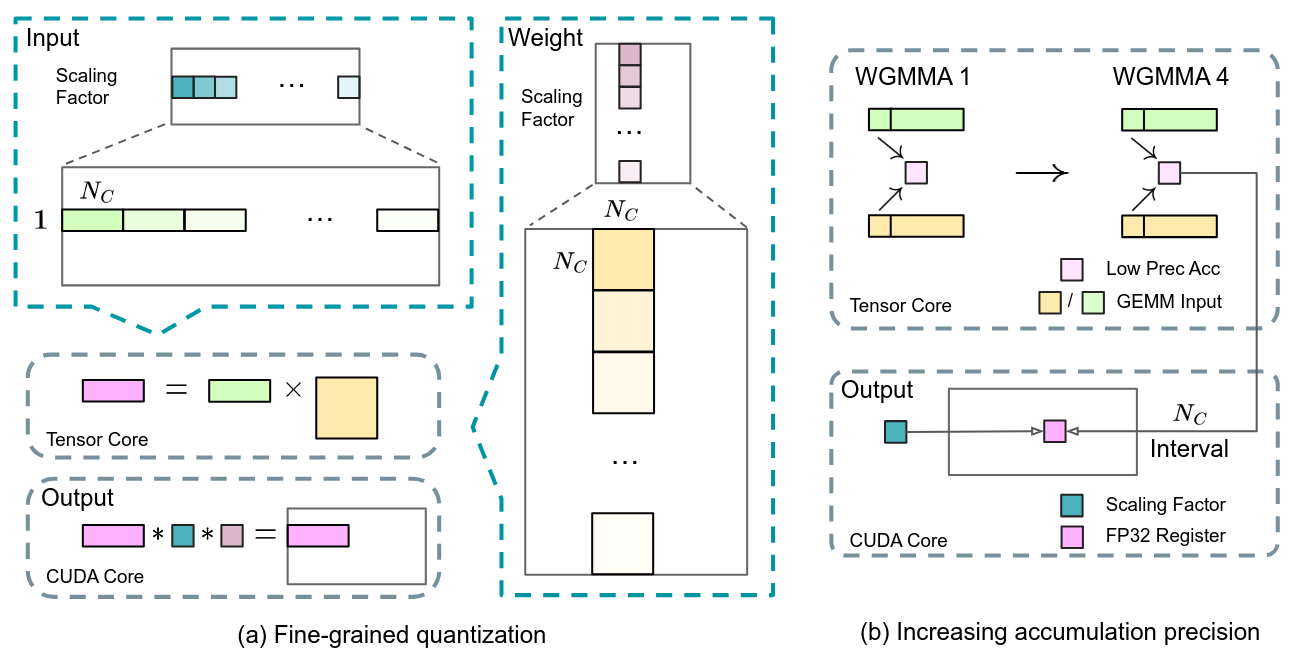
提高累加操作的精度 (Increasing Accumulation Precision)
在 NVIDIA H800 GPUs 上执行 FP8 GEMM 的累加操作,会使精度受限在大约 14 个 bit。并且随着隐藏层维度 $K$ 的增大,该问题会表现的更加明显:$K$ 等于 4096 时,Tensor Cores 上的最大误差达到了将近 2%。为了解决这个问题,DS 采用了提升至 CUDA 核心层面的策略来实现更高精度的计算。具体来说,如上图 (b) 部分所示:
- 首先,在 Tensor Cores 上执行矩阵乘加操作 (MMA, Matrix Multiply-Accumulate) 时,仍然使用低位宽 (FP8) 来累加中间结果,此时误差会逐渐地积累。
- 每当完成 $N_c$ 次累加操作后,就将当前这部分结果拷贝到 CUDA 核心的 FP32 寄存器,在那里执行全精度累加,部分地消除低精度运算的累积误差。
- 利用此前对这 $N_c$ 个数据使用的放缩因子进行 反量化过程 (Dequantization Process) ,这带来了轻微的计算成本。注意:这 $N_c$ 个数据的放缩因子是同一个。
利用强化学习提升模型能力:对齐人类水平,挖掘模型潜能
DS 团队的奖励模型 RM 由两部分组成:基于规则的 和 基于模型的。并使用了 群体相对策略优化算法 (GRPO) 进行强化学习,区别于过去使用的 PPO 算法。
回馈函数 RM 的设计
基于规则的 对于具有明确回答形式和内容的问题,如数学、代码问题。DS 根据一些特定的规则或者是编译器的反馈来确定模型回答的得分。该得分是明确的、固定的。
基于模型的 则是对于那些回答形式以及内容相对自由的问题,比如“写一首诗”、“帮我总结内容”、“对输入文本进行润色”等涉及创意写作的问题。模型回答的得分将由一个 概率模型 估计。通常,该概率模型与 LLM 结构完全相同,仅是将输出头从概率预测变为数值型预测而已。其参数将被初始化为 LLM 训练过程中的某个 checkpoint,用以保持训练的稳定性。
显然,对 基于模型的 奖励模型来说,需要预先收集 人类偏好数据 (Human Preference Data),并确定合适的 优化目标函数 (Optimization Function) 进行反复迭代。这一点与 ChatGPT 和 LLaMA 等大同小异。然而,DS 更强调思维链(CoT)的质量,因此训练该 RM 的偏好数据不仅包括最终奖励,还包括导致该奖励的推理过程。
群体相对策略优化算法 (GRPO)
DS 使用了 群体相对策略优化算法 (GRPO, Group Relative Policy Optimization),该算法摒弃了通常与策略模型大小相同的评估模型,而是从组得分中估计 baseline。具体来说,对于每个问题 $q$,GRPO 从旧策略模型 $\pi_{\theta_{old}}$ 中采样一组输出 $\{o_1,o_2,…,o_G\}$,然后通过最大化如下目标来优化策略模型 $\pi_{\theta}$:
$$
\begin{aligned}
\mathcal{J}_{GRPO}(\theta) &= \mathbb{E}[q \sim P(Q), \{o\}_{i=1}^{G} \sim \pi_{\theta_{old}} (O | q)] \\
&\frac{1}{G} \sum_{i=1}^{G} ( \min( \frac{\pi_{\theta}(o_i | q)}{\pi_{\theta_{old}}(o_i | q)}, \text{clip}(\frac{\pi_{\theta}(o_i | q)}{\pi_{\theta_{old}}(o_i | q)}, 1 - \epsilon, 1 + \epsilon)A_i) - \beta\mathbb{D}_{KL}(\pi_{\theta}||\pi_{ref})), \\
where.\quad&\mathbb{D}_{KL}(\pi_\theta || \pi_{ref}) = \frac{\pi_{ref}(o_i|q)}{\pi_\theta(o_i|q)} - \log \frac{\pi_{ref}(o_i|q)}{\pi_\theta(o_i|q)} - 1
\end{aligned}
$$
其中 $\epsilon$ 和 $\beta$ 是超参数;$\pi_{ref}$ 是偏好模型;$A_i$ 是优势估计 (advantage),基于每个组的输出所对应的奖励集 $\{r_1,r_2,\cdots,r_G\}$ 计算:
$$A_i = \frac{r_i - \text{mean}(\{r_1,r_2,\cdots,r_G\})}{\text{std}(\{r_1,r_2,\cdots,r_G\})}$$
在强化学习过程中,DS 整合了来自不同领域的提示,例如编码、数学、写作、角色扮演和问题回答。这种方法不仅使模型更接近人类的偏好,而且提高了基准测试的性能,特别当可用的 SFT 数据有限时。
DeepSeek-V3 的表现:屠榜同行,时代先声?
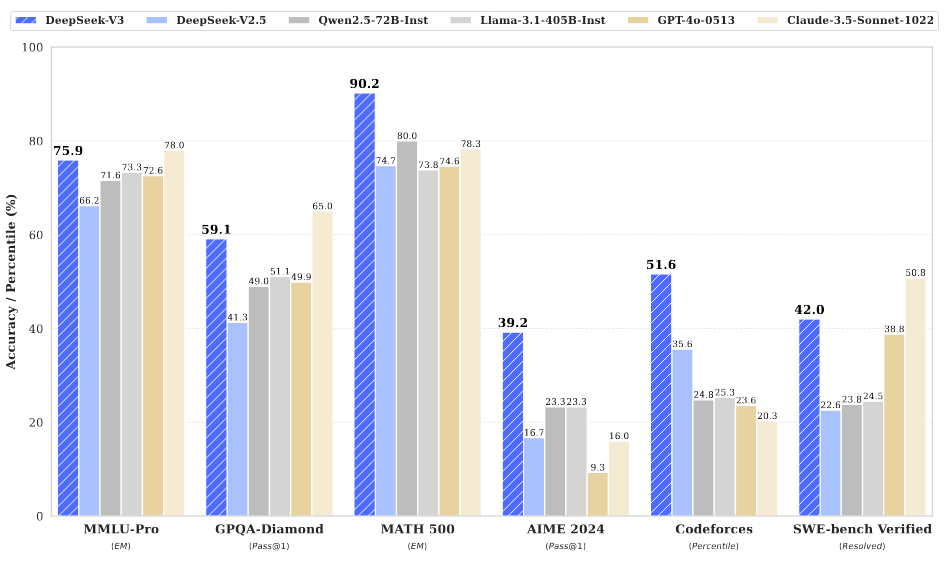
评估体系设计覆盖语言模型能力的多维度验证,构建了包含 指令遵循(IFEval)、长文本处理(LongBench v2)、专业领域(GPQA、CNMO 数学奥赛)、代码能力(SWE-Bench、LiveCodeBench)等 12 个前沿测试集的综合评价矩阵。
对比实验中,研究选取了 DeepSeek-V2 系列、Qwen2.5 72B、LLaMA-3.1 405B、Claude-Sonnet-3.5 及 GPT-4o 等当前主流大模型作为基准,通过 API 接口进行系统性能力评测,重点考察模型在 2024 年最新测试数据(如 AIME 数学竞赛、Codeforces 编程题)上的表现。这种多维度的评估策略为全面衡量模型的实际应用能力提供了可靠依据。
DeepSeek-R1 的相关内容:强化学习方面的努力与尝试
两大核心探索:自主学习和知识蒸馏
- 对自主学习能力的探索
- 直接在基础模型上实施两阶段强化学习(RL),颠覆了传统依赖监督微调(SFT)的范式。
- 首阶段段通过自主探索思维链(CoT)形成 DeepSeek-R1-Zero 模型。验证了无需人工标注数据即可通过纯 RL 激励大语言模型发展自我验证、反思、长程推理等能力。
- 首次证明模型推理能力可通过强化学习自主演化。
- 第二阶段结合 RL 与 SFT 的混合训练,构建了同时具备人类偏好的对齐和复杂问题解决能力的 DeepSeek-R1 模型。
- 对知识蒸馏的小模型的探索
- 将大模型推理模式迁移至小模型,实现了小模型性能的突破性提升。
- 基于 DeepSeek-R1 生成的推理数据,对 Qwen2.5 和 Llama3系 列模型进行蒸馏后,不同规模的模型在数学竞赛(如 AIME 2024 达到 72.6%)、代码生成(LiveCodeBench 57.2%)等任务中显著超越同尺寸开源模型,部分指标甚至超过更大参数量的模型。
DeepSeek-R1-Zero 的自主演化过程
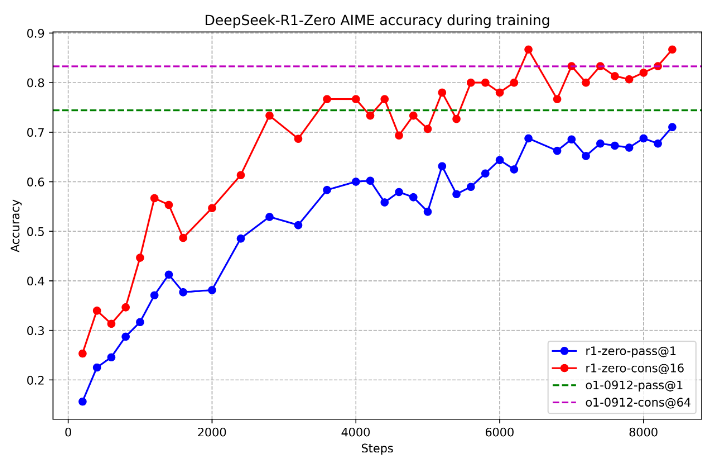
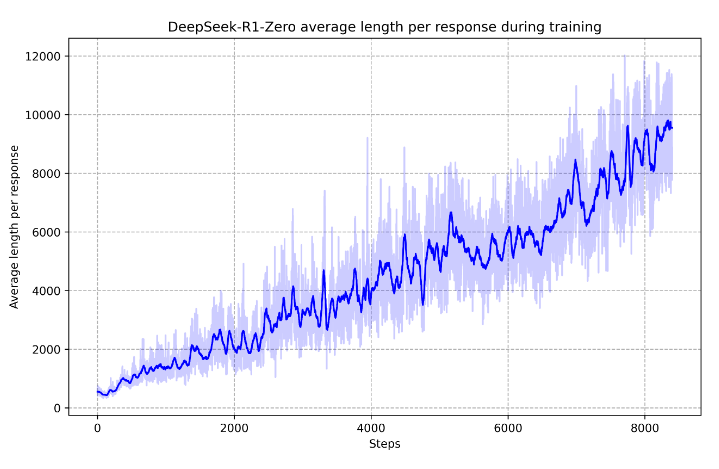
DS 团队使用 Accuracy Rewards 和 Format Rewards 来作为 DeepSeek-R1-Zero 的奖励模型。 这两个奖励模型都是基于模板的,前者衡量回答是否正确、后者衡量回答是否具备要求的格式。如果把 DeepSeek-R1-Zero 当作一个 Agent,那它的目标就是尽一切可能获得更高的奖励。允许其使用任何手段,包括人类所未曾想到的,这即是强化学习。
随着训练次数的增加,DS 团队发现了一些有趣的现象。首先是 DeepSeek 的思考时间和回答的长度都有了显著的增加。其次,研究人员观察到 DeepSeek 的思考过程中出现了一个有趣的 “啊哈”时刻:DS 在思考的过程中,会突然插入一句类似于 Wait, wait. Wait. That’s an aha moment I can flag here. 的话。事实证明,这个“啊哈”时刻是很有效的 reminder,可以提醒大模型总结上文,并开启更高层级的后文思考。🤔 (本博客至此正式文完,2025 年 5 月 10 日)